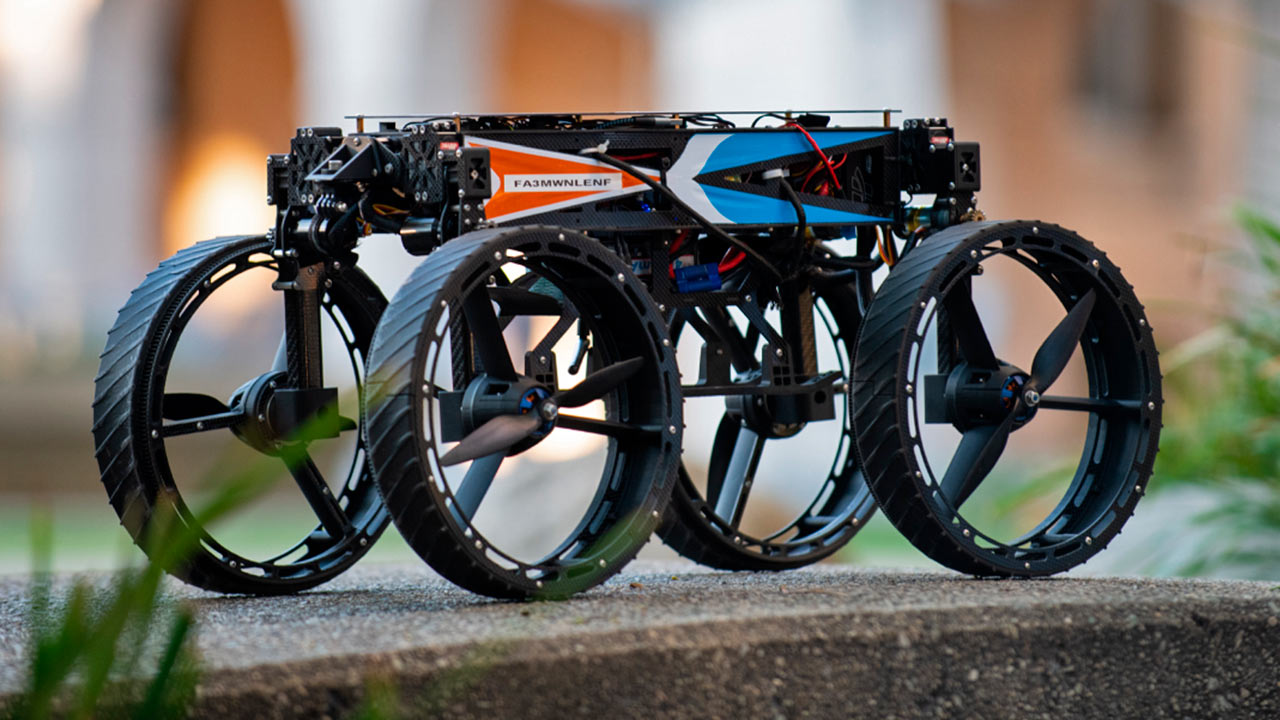
Dispositivo robótico capaz de transformar sus apéndices de ruedas a propulsores para movilizarse por tierra o aire.
Morphobot, robot multimodal con locomoción bioinspirada. (Crédito: Sihite, E., Kalantari, A., Nemovi, R. et al. - Nat Commun 14, 3323 (2023). https://doi.org/10.1038/s41467-023-39018-y )
El diseño y funcionamiento que se plasma en un robot suele concebirse a partir de una necesidad específica o problema detectado como desafío inicial. Se trata de un abordaje que le imprime al desarrollo del dispositivo características constructivas fijas o permanentes, en línea con un escenario de operación definido y delimitado.
Un equipo de ingenieros de la Universidad del Noreste (Boston, EE.UU.) introduce una novedosa e innovadora perspectiva a partir de la premisa de un robot que puede transformarse, en forma dinámica, para sortear o superar los nuevos obstáculos que se le presentan. En otra palabras, un dispositivo que tiene la capacidad de adaptarse de modo activo para desplazarse por entornos diversos, sea por tierra o por aire.
Así surge Morphobot, identificado técnicamente como Multi-Modal Mobility Morphobot (M4), siglas que en inglés sintetizan el abordaje propuesto: movilidad multi-modal. Para lograr este cometido, el dispositivo transforma sus apéndices o prolongaciones de ruedas a propulsores y de piernas a manos. Los investigadores publicaron recientemente su estudio en la revista Nature Communications, donde exponen el diseño del dispositivo y exhiben sus capacidades multi-modales con diversos experimentos.
El diseño aplicado en este robot se inspira en la naturaleza, poniendo el foco de estudio en estrategias de locomoción empleadas por algunos animales, que adaptan el uso de sus extremidades para sortear o afrontar diversos terrenos.
El proyecto estudia, por ejemplo, los leones marinos que pueden caminar por tierra con sus aletas; las suricatas que se sostienen sobre sus extremidades posteriores para explorar su entorno; el ave Hoatzins (Opisthocomus hoazin), que puede utilizar sus alas para un avance cuadrúpedo, y el pájaro chukar (Alectoris chukar), que puede usar sus alas para subir a cuatro patas por pendientes pronunciadas.
Descripción gráfica de la locomoción estudiada en ciertos animales, bioinspiración aplicada en Morphobot: a) Leones marinos, b) Suricatas, c) Hoatzin, d) Chukar. (Crédito: Sihite, E., Kalantari, A., Nemovi, R. et al. - Nat Commun 14, 3323 (2023). https://doi.org/10.1038/s41467-023-39018-y )
El estudio investiga cómo estas especies demuestran una asombrosa destreza en emplear las mismas extremidades en diferentes formas, generando múltiples modos de locomoción. Gracias a esa habilidad, las especies abordadas poseen un movimiento altamente adaptable, que habilita su interacción y navegación por ambientes variados, extendiendo de esa manera el rango de su hábitat.
M4 puede emplear sus componentes multi-funcionales, formados por diversos tipos de actuadores, para volar, trepar, agacharse, balancease, tumbarse, explorar y loco-manipular. Morphobot puede transitar por pendientes de hasta 45º de inclinación y avanzar por terrenos con obstáculos grandes, empleando el modo de balanceo.
Robot multimodal que modifica su método de locomoción para arrastrarse, rodar o volar en función de los obstáculos de su entorno. (Crédito: Sihite, E., Kalantari, A., Nemovi, R. et al. - Nat Commun 14, 3323 (2023). https://doi.org/10.1038/s41467-023-39018-y )
El dispositivo posee computadoras a bordo y sensores, pudiendo aplicar de forma autónoma sus modos para negociar con un ambiente no estructurado. Gracias a esta versatilidad, el aparato tiene múltiples ámbitos de aplicación, como por ejemplo “exploraciones de Marte, entrega automatizada de paquetes en zonas residenciales, así como labores de búsqueda y rescate tras catástrofes naturales”, comenta Alireza Ramezani, uno de los ingenieros y autores principales del proyecto, en una entrevista de la agencia SINC.
Ramezani reconoce que acuñar un diseño final para el aparato no ha sido una tarea sencilla para el equipo de investigadores: “cumplir los requisitos contradictorios que imponen los diferentes modos de locomoción en una sola plataforma es un enorme desafío”. El ingeniero, quien se desempeña además como profesor del departamento de Ingeniería Eléctrica e Informática en la mencionada universidad en Boston, explica además que “los robots terrestres necesitan componentes voluminosos, mientras que los aéreos requieren estructuras ligeras. Integrar estos requisitos en un único aparato puede ser todo un reto”.
En relación a sus características técnicas, Morphobot posee cuatro patas con dos articulaciones en cada una y rotores en los extremos. El dispositivo pesa seis kilos, mide 70 cm. de largo y 35 de alto. Asimismo, se destaca entre otros aspectos versátiles, que sus hélices pueden funcionar como patas, propulsores o ruedas.
Sorprendete con este robot “transformer” en el siguiente video (activá el subtítulo):